אין מוצרים בסל הקניות.
אודותינו ואודות הקהילה

חנות אלקטרוניקה למייקרים
מה שיש לנו לשתף בנוגע לציוד האלקטרוניקה שאנחנו מספקים למייקרים


353.06₪ כולל מע"מ
Want to connect several motors and sensors to your mechatronic project? The Arduino MKR Motor Carrier is the perfect companion for Arduino MKR boards as it will allow you to rapidly prototyping and build your projects.
משלוח UPS מהיר : עד 3 ימי עסקים
To use the Carrier, you will need to plug an MKR board (the MKR1000, MKR Zero, or other) on the headers at the center of the board. Make sure the MKR board is connected in the proper direction. You can do this by making sure the info printed on the side of the headers are matching for both the MKR board and the Motor Carrier.
Features
Resources
Tech Specs
|
Microcontroller |
ATSAMD11 ( Arm Cortex-M0+ processor) |
|
Max current (MC33926) |
5 Amps Peak, RMS current depending on the degree of heat sink provided |
|
Max current (DRV8871) |
3 Amps peak, current limited by current sense resistor. |
|
Rated voltage |
6.5 to 11.1V |
|
Reverse current protection |
Yes |
|
Over Temperature shutdown protection (for DC motor drivers) |
Yes |
|
Clock speed |
48 Mhz |
|
On board voltage regulator |
5V |
|
Interface |
Terminal block and 3 pin/4 pin header connector |
|
Compatibility |
MKR Family |
Arduino Nano Boards & Modules
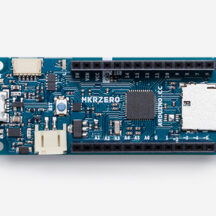
Arduino MKR Boards & Modules

ארדואינו
Edu Kits

Solutions and Kits

ארדואינו
Summer Sales


Arduino MKR Shields

New Products

Arduino Nano Boards & Modules
סימנת בפרטי המשלוח איסוף מנקודת שירות, יתכן וחברת השילוח תעדכן את נקודת האיסוף לפי שיקול דעתה במקרה של עומס בנקודת מסירה שבחרתם.
אני מאשר את התנאיםטלפון: 0584998006
כתובת: רחוב הצורן 4 א, נתניה
![]()

סימנת בפרטי המשלוח איסוף עצמי, כמה דברים לדעת לפני:
טלפון: 0584998006
כתובת: רחוב הצורן 4 א, נתניה
![]()